一文总结你需要的OpenCV操作 |
您所在的位置:网站首页 › opencv 边缘 › 一文总结你需要的OpenCV操作 |
一文总结你需要的OpenCV操作
|
目录一、OpenCV简介1.1 OpenCV是什么1.2 安装及使用二、图像的基础2.1 成像原理2.2 图像格式2.3 颜色空间三、OpenCV基础操作3.1 图像的读取、显示、保存3.2 通道转换三、OpenCV常见图像处理3.1 在图像上绘制几何图像及添加文字3.2 图像的几何变换3.3 图像滤波3.4 图像增强3.5 形态学变换
一、OpenCV简介
1.1 OpenCV是什么
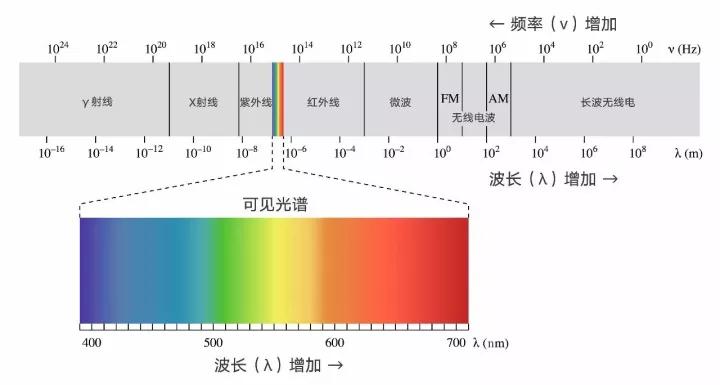
OpenCV是一种开源的计算机视觉库,提供了广泛的图像处理和计算机视觉算法的实现。它最初是由英特尔开发的,现在已经成为计算机视觉领域最流行和广泛使用的开源库之一。OpenCV支持多种编程语言,包括C++、Python和Java等。它的主要特点是它提供了许多预先实现的算法,包括特征检测、图像处理、目标跟踪、人脸识别、运动估计、3D重建和深度学习等领域。 1.2 安装及使用 python 3.x Jupyter pip install jupyter opencv-python pip install opencv-python #或opencv-contrib-python # opencv-python包含基本的opencv # opencv-contrib-python是高配版,带一些收费或者专利的算法,还有一些比较新的算法的高级版本,这些算法稳定之后会加入opencv-python。已经安装opencv,查看opencv库的安装路径 方法一:用__file__属性 import cv2 cv2.__file__ # 'XXX\\Python\\Python310\\lib\\site-packages\\cv2\\__init__.py' 方法二:用pip show opencv-python C:\Users\Administrator> pip show opencv-python # 输出示例: # Name: opencv-python # Version: 4.7.0.72 # Summary: Wrapper package for OpenCV python bindings. # Home-page: https://github.com/opencv/opencv-python # Author: # Author-email: # License: Apache 2.0 # Location: xxx\python310\lib\site-packages // 此处即为所求安装路径 # Requires: numpy, numpy, numpy, numpy # Required-by:源码github地址:this 使用OpenCV进行图像处理的接口源地址:here 二、图像的基础 2.1 成像原理以电磁波谱辐射为基础的图像我们最为熟悉,某个物体发出电磁波被其他物体所接受从而形成图像,常见的由X射线和可见光波段的图像。
颜色空间又称为彩色模型,在某些标准下对彩色加以说明,常见的颜色空间有: RGB,主要用于计算机图形学中,根据人眼识别的颜色进行创建 HSV[色调、饱和度、明度],根据颜色的直观特性创建 HSI【色调、饱和度、强度】,反应人感知颜色的基本属性,与人感知颜色的结果一一对应 CMYK【青色、品红、黄色、黑色】,应用于印刷业 三、OpenCV基础操作 3.1 图像的读取、显示、保存 读取图像 import cv2 img = cv2.imread("图像路径", "读取方式") # cv2.IMREAD_COLOR: 默认值,加载一张彩色图像,忽视透明度,数字表示1 # cv2.IMREAD_GRAYSCALE: 加载一张灰度图,数字表示0 # cv2.IMREAD_UNCHANGED: 加载图像,包括它的Alpha通道,数字表示-1 print(img.shape) # img按照BGR的格式进行存储 显示图像 cv2.imshow("窗口名", img) # cv2.waitKey()是一个键盘绑定函数,单位是毫秒,0代表等待键盘输入 k = cv2.waitKey(0) if k == 27: # 输入ESC键退出 cv2.destroyAllWindows() 保存图像 cv2.imwrite("保存路径+名称", img) 3.2 通道转换图像分辨率,每英寸图像内的像素点数,分辨率越高,像素点密度越高,图像越清晰。 图像的位深度[8位、24位、32位],是指描述图像每个像素点数值所占的二进制位数。如8bit只能表示灰度图像,每个点的值的范围为0-255【\(2^8\)】,24bit可以表示RGB三通道的图像,32bit可以表示RGB+Alpha四通道的图像。也就是说,位深度越大则图像能表示的颜色数就越多,色彩越丰富逼真。 通道转换 # 3==>1: GRAY = R * 0.114 + G * 0.587 + R * 0.299 # 1==>3: R = G = B = GRAY, A = 0 cv2.cvtColor(img, flag) # img为待转换的图像,flag为转换模式 # cv2.COLOR_BGR2GRAY,彩色转灰度 # cv2.COLOR_GRAY2BGR,灰度转彩色 # cv2.COLOR_BGR2RGB, BGR格式转为RGB格式,opencv读入的图像是BGR格式的 # 注意:matplotlib.pyplot中使用的是RGB格式,需要进行转换后再使用 import matplotlib.pyplot as plt img = cv2.imread("test.png", cv2.IMREAD_COLOR) img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) plt.subplot(1, 2, 1) plt.imshow(img) # 会发现此图像有色差 plt.subplot(1, 2, 2) plt.imshow(img_rgb) # 正常 通道分离将彩色图像,分成b, g, r三个单通道图像。 import cv2 img = cv2.imread("orig.png") b, g, r = cv2.split(img) 通道合并可是使用split对图像进行通道分离后,对单独通道进行修改,然后再合并为彩色图像。 import cv2 import numpy as np img = cv2.imread("orig.png") b, g, r = cv2.split(img) b[:] = 0 img_merge = cv2.merge([b, g, r]) zeros = np.zeros(image.shape, dtype="uint8") cv2.imshow("GREEN", cv2.merge([zeros, g, zeros])) 图像直方图图像直方图(Image Histogram)用来表示数字图像中亮度分布的直方图,描述的是每个亮度值的像素数,能够反映图像亮度的分布情况。直方图常被用于图像的二值化。 import cv2 img = cv2.imread("test.png") # cv2.calcHist([img], channels, mask, histSize, ranges) hist = cv2.calcHist([img, [0], None, [256], [0, 255]]) # channels: 待计算的通道 # histSize:表示直方图分成多少份 三、OpenCV常见图像处理 3.1 在图像上绘制几何图像及添加文字 import cv2 img = cv2.imread("test.png") # 绘制线段 cv2.line(img, (0, 0), (511, 511), (255, 0, 0), 5, cv2.LINE_AA) # 待绘制的图像,起点,终点,线段颜色,线宽, linetype线条的类型 # 矩形绘制 # cv2.rectangle(待绘制图像, 左上角坐标, 右下角坐标,颜色,线宽,线型) cv2.rectangle(img, (384, 0), (510, 128), (0, 255, 255), -1) # 线宽为-1表示区域填充 # 圆绘制 # cv2.circle(待绘制图像, 圆心,半径,颜色,线宽,线型) cv2.circle(img, (447, 63), 63, (0, 0, 255), -1) # 椭圆绘制 # cv2.ellipse(待绘制图像,中心点坐标,(长轴长度、短轴长度), 旋转角, 起始角度,终止角,颜色、线宽、线型) cv2.ellipse(img, (256, 256), (100, 50), 0, 0, 360, (255, 0, 0), -1) # 起始角和终止角控制了,是画一整个椭圆,还是椭圆的一部分 # 多边形绘制 # cv2.polylines(img, 点对,线段是否闭合,颜色,线宽、线型) pts = np.array([[10, 5], [50, 10], [70, 20], [20, 30]]) pts = pts.reshape((-1, 1, 2)) # 将点对转换为1行两列 cv2.polylines(img, [pts], True, (0, 255, 255)) # 添加文字 # cv2.putText(img, 要添加的文本, 文字的起始坐标[左下角的起点], 字体,文字缩放比例,颜色,线宽,线型) font = cv2.FONT_HERSHEY_SIMPLEX cv2.putText(img, "OpenCV", (50, 200), font, 3, (0, 255, 255), 5, cv2.LINE_AA) 3.2 图像的几何变换关于图像几何变换的接口的官方说明,点这里。 图像的几何变换包括平移、缩放、旋转、镜像、仿射变换、透视变换等。 # 仿射变换函数 cv2.warpAffine(img, M, dsize, flags, borderMode, borderValue) # 输入图像,变换矩阵,输出图像尺寸,插值方法,边界像素模式,边界填充值 # 插值方法有四种: # cv2.INTER_NEAREST(最近邻插值,默认,速度最快)、 # cv2.LINEAR(线性插值) # cv2.INTER_AREA(区域插值) # cv2.INTER_CUBIC(三次样条插值) # cv2.INTER_LANCZOS4(Lancozos插值)平移:将图像上所有的点按照指定的平移量水平或垂直移动。 \(x_1 = x_0 + t_x\) \(y_1 = y_0 + t_y\) import cv2 import numpy as np img = cv2.imread("test.png") # 构造移动变换矩阵 # 在x方向移动50,y方向移动25 H = np.float32([[1, 0, 50], [0, 1, 25]]) rows, cols = img.shape[:2] res = cv2.warpAffine(img, H, (cols, rows)) # 注意,这里的dsize是先列后行缩放:缩小图像称为下采样【down-Sampling】,放大图像称为上采样【up-Sampling】 import cv2 img = cv2.imread("test.png") # cv2.resize(src, dsize=None, fx, fy, interpolation) # 待缩放图像,输出图像尺寸[与比例因子二选一],fx沿水平轴的比例因子,fy沿y轴的比例因子,插值方法 cv2.resize(img, None, fx=2, fy=2, interpolation=cv2.INTER_CUBIC)旋转:以某点为中心,旋转一定的角度,也就是说将图像上所有像素点旋转一个相同的角度。 ---- 用旋转来扩充数据集,因为图像具有旋转不变性,旋转前后类别一致。 假设原来的坐标为: \(x_0 = r cos(\alpha), y_0 = r sin(\alpha)\) 旋转后的坐标为: \(x = rcos(\alpha + \theta) = rcos{\alpha}cos{\theta} - rsin{\alpha}sin{\theta} = x_0cos{\theta} - y_0 sin{\theta}\) \(y = rsin(\alpha + \theta) = rsin{\alpha}cos{\theta} - rcos{\alpha}sin{\theta} = y_0cos{\theta} + x_0 sin{\theta}\) 注意: 图像旋转之前,为了避免信息丢失,一定要有坐标平移 旋转后会有空洞,对这些空洞要进行填充 import cv2 # 旋转矩阵:图像的旋转中心,旋转角度,缩放比例[0.5 正表示逆时针旋转并将结果缩放为原来的0.5] # M = cv2.getRotationMatrix2D(center, angle, scale) img = cv2.imread("test.png") rows, cols = img.shape[:2] M = cv2.getRotationMatrix2D((cols/2, rows/2), 45, 2) dst = cv2.warpAffine(img, M, (cols, rows), borderVal=(0, 255, 255))仿射变换:通过仿射变换对图像进行平移、旋转、缩放、剪切、反射等操作,以达到数据增强的效果。 # 求仿射变换矩阵, pos1表示变换前的位置,pos2表示变换后的位置 # M = cv2.getAffineTransform(pos1, pos2) import cv2 import numpy as np img = cv2.imread("test.png") pos1 = np.float32([[50, 50], [200, 50], [50, 200]]) pos2 = np.float32([[10, 100], [200, 50], [100, 250]]) M = cv2.getAffineTransform(pos1, pos2) res = cv2.warpAffine(img, M, (cols, rows))透视变换:本质是将图像投影到一个新的视平面上。 # pos1表示透视变换前的4个点对应的位置 # pos2表示透视变换后的4个点对应的位置 # M = cv2.getPerspectiveTransform(pos1, pos2) import cv2 import numpy as np img = cv2.imread("test.png") pos1 = np.float32([[114, 82], [287, 156], [8, 100], [143, 177]]) pos2 = np.float32([[0, 0], [188, 0], [0, 262], [188, 262]]) M = cv2.getAffineTransform(pos1, pos2) res = cv2.warpAffine(img, M, (cols, rows)) 3.3 图像滤波关于平滑图像的接口的官方说明。 滤波,就是过滤掉某些信号。在图像处理领域,图像可以看作是一个二维信号,其中像素点的灰度值表示信号的强弱;像素值变化剧烈的地方称为高频区域,像素值变化缓慢、平坦的地方称为低频区域。 根据过滤内容,可以将滤波器分为高通滤波器和低通滤波器,高通滤波器过滤低频信号,通过高频信号,从而可以检测尖锐、变化明显的地方,常用于图像的边缘检测;低通滤波器过滤高频信号,放行低频信号,可以让图像变得平滑,主要用于图像的平滑去噪。 按照滤波器的实现方式,可以将滤波器分为线性滤波器和非线性滤波器。常见的线性滤波器有方框滤波、均值滤波、高斯滤波等;非线性滤波器有中值滤波、双边滤波等。 线性滤波:使用领域内像素点值的加权和计算当前像素点的结果 \(O(x, y) = \sum{f(x + i, y + j) * k(i, j)}\) 方框滤波: \[ kernel = \alpha \begin{bmatrix} 1&1\cdots&1\\ 1&1\cdots&1\\ \vdots&\vdots&\vdots \\ 1&1\cdots&1 \\ \end{bmatrix}, \alpha = \left\{ \begin{matrix} {1 \over {height * width}}, normalize=True \\ 1, normalize = False \end{matrix} \right. \]均值滤波: \[ kernel = {1 \over {height*width}} \begin{bmatrix} 1&1\cdots&1\\ 1&1\cdots&1\\ \vdots&\vdots&\vdots \\ 1&1\cdots&1 \end{bmatrix} \]高斯滤波:可消除高斯噪声,广泛用于图像处理的降噪过程。kernel的权重由中心向周边递减,中心权重最大,越远离中心的像素点权重越低。 kernel的定义可以参考这里。 在C++接口中,接口中可以定义\(\sigma_x\)和\(\sigma_y\);Python接口中,只传入\(\sigma_x\),y轴的\(\sigma\)由内部核大小计算得出。 import cv2 # boxFilter # cv2.boxFilter(src, depth, ksize, normalize) img = cv2.imread("test.png") cv2.boxFilter(img, -1, (3, 3), normalize=True) # 均值滤波 # cv2.blur(src, ksize) cv2.blur(img, (3, 3)) # 高斯滤波 # cv2.Guassianblur(src, ksize, std) # std为标准差,调整kernel的下降速度,std越大下降越慢[高斯曲线越矮胖,远离中心点的像素对中心像素的影响越大],滤波结果越平滑。 blur = cv2.GaussianBlur(img, (5, 5), 0) 非线性滤波:中值滤波:利用邻域内像素点的中值作为目标像素点的值【kernel区域内像素值排序取中值】。可用于去除椒盐噪声和斑点噪声。 双边滤波:同时考虑图像的空间邻近度和像素值相似性,达到保边去噪的目的。 \(I^{filter}(x) = {1 \over W_p}\sum_{x_i}I(x_i)f_r(||I(x_i) - I(x)||)g_s(||I(x_i) - I(x)||)\) # 中值滤波 # cv2.medianBlur(img, ksize) median = cv2.medianBlur(img, 5) # 双边滤波 # cv2.bilatralFilter(src, d, sigmaColor, sigmaSpace) # d邻域直径,sigmaColor灰度值相似性高斯标准差,sigmaSpace空间邻近高斯标准差 blur = cv2.bilateralFilter(img, 9, 75, 75) 3.4 图像增强 直方图均衡化:将图像通过某种变换,得到一幅灰度值直方图均匀分布的新图像。可用于消除过度曝光,也可以提升暗部细节,计算方式为: 统计原图中每个灰度级出现的次数 计算累积归一化直方图 重新计算像素点的像素值 import cv2 # 直方图均衡化,接收单通道的图像, 如果是彩色图像,需要将其进行分离然后处理再合并 # cv2.equalizeHist(img) img = cv2.imread("test.png") b, g , r = cv2.split(img) bH = cv2.equalizeHist(b) gH = cv2.equalizeHist(g) rH = cv2.equalizeHist(r) imgH = cv2.merge((bH, gH, rH)) Gamma变换:对输入图像灰度值进行非线性操作,使得输出图像的灰度值与输入图像的灰度值呈指数关系,矫正过曝或过暗的图片。 \(V_{out} = A V_{in}^\gamma\) 原理及实现可参考Python-OpenCV中的Gamma变换(校正)。 3.5 形态学变换当我们想要对数字图像进行处理和分析时,形态学运算是一种非常有用的工具。它主要用于图像处理领域中的形态学分析,例如形状检测、边缘检测、特征提取等。 形态学运算是一种针对二值图像(即黑白图像)进行的基本操作,它可以通过对图像中的像素进行特定的处理,来改变或增强图像的形态结构。 以下是形态学运算中最基本的两个操作: 膨胀(Dilation):将一个结构元素(通常是正方形或圆形)放在图像的某个像素上,如果该像素为白色(值为1),则该结构元素内的所有像素都被标记为白色(1),从而扩大了图像中的白色区域。膨胀操作可以用来填充小的空洞或连接不连通的区域。 腐蚀(Erosion):将一个结构元素放在图像的某个像素上,如果该像素为黑色(值为0),则该结构元素内的所有像素都被标记为黑色(0),从而缩小了图像中的白色区域。腐蚀操作可以用来去除小的噪点或分离连接的物体。这两种基本的形态学运算通过重复执行多次,可以实现复杂的图像处理操作,如开运算、闭运算、梯度等。 开运算(Opening):先对图像进行腐蚀操作,然后再进行膨胀操作,它可以用来去除图像中的小噪点和连接不紧密的区域。 闭运算(Closing):先对图像进行膨胀操作,然后再对图像进行腐蚀操作,它可以用来填充图像中的小孔或连接不完整的区域。 梯度(Gradient):对图像进行膨胀和腐蚀操作,然后将两幅图像相减,可以得到原始图像中物体的边缘。 顶帽(Top Hat):原图与开运算图的差值,突出原图像中比周围区域亮的区域 黑帽(Black Hat):闭操作图像-原图像,突出原图像中比周围暗的区域形态学运算,可以凸显目标对象最本质的形状特征,如边界、连通区域等。 # 获取结构元素 # kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (7, 7)) # 矩形 # kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (7, 7)) # 十字形 # kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7)) # 椭圆 # 腐蚀操作 cv2.erode(src, kernel, anchor, iterations) # element: 腐蚀操作的内核,默认为一个简单的3x3矩阵 # anchor: 内核中心点,默认为Point(-1, -1) # iterations:腐蚀次数,默认为1 # 膨胀操作 cv2.dilate(src, kernel, iterations=1) # cv2.morphologyEx(img, MorphTypes, kernel) # MorphTypes包含如下类型: # cv2.MORPH_ERODE、cv2.MORPH_DILATE # cv2.MORPH_OPEN # dst = dilate(erode(src, element)) # cv2.MORPH_CLOSE # dst = erode(dilate(src, element)) # cv2.MORPH_GRADIENT # dst = dilate(src, element) - erode(src, element) # cv2.MORPH_TOPHAT # dst = tophat(src, element) = src - open(src, element) # cv2.MORPH_BLACKHAT # dst = blackhat(src, element) = close(src, element) - src # 开运算 open_img = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel) # 闭运算 close_img = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel) |
【本文地址】
今日新闻 |
推荐新闻 |